【三维激光扫描测绘】GeoSlam在林业中的应用
项目背景:
树木作为生态系统的重要组成部分及重要的生产者,在生态圈承担着不可或缺的作用。随着测绘技术的进步与发展,我国数字化林业建设进程的不断向前推进。三维激光扫描作为一种可以快速获取目标的三维空间坐标,并以点云的形式展现出物体表面真实结构的新型测绘技术,通过三维激光扫描获取的点云数据对数目进行三维重建,可以实现对树木形态、树木胸径、树冠表面积、体积等参数的准确获取。为树木生长趋势、森林资源调查、生态系统碳循环、名木古树保护等研究提供了可信的基础数据。今天任务扫描林业。

项目痛点:
- 效率低下:无论是地面式还是机载式,都存在一定的数据采集效率问题,地面式多站扫描效率不高,机载式在复杂环境时也会受影响。
- 数据不完整:地面式难以全面获取数目整体点云,机载式可能导致数目数据缺失,影响对树木整体形态和相关数据测量的完整性。
- 受环境制约大:地面式受地形坡度等限制明显,在山区等特殊环境工作困难,机载式也会受树冠等因素制约。
- 精准度受限:例如在测量树木胸径等方面,可能因为数据缺失或不完整而影响精准度。
- 作业安全隐患大:地面式在某些复杂地形作业存在一定安全风险**。**
- 灵活性不足:不能很好适应各种复杂多变的林业场景和需求。
解决方案:
使用GeoSLAM手持三维激光扫描仪先进行外业测量(在扫描时多重复扫描几遍保证后期点云数据处理方便),采集结束进行内业点云数据处理。
GeoSLAM工作流程:
规划扫描路线:根据林地范围和树木分布情况,大致规划合理的扫描行走路线。
开始扫描:手持扫描仪沿规划路线缓慢移动,对树木和周边环境进行扫描,同时注意保持一定的扫描重叠度。
数据采集:在扫描过程中设备实时记录点云数据(对于面积较大的需在不同区域进行多次扫描,以确保全面覆盖)
数据处理:将采集的点云数据导入专业软件中进行去噪点、拼接等处理,继而进行具体应用。
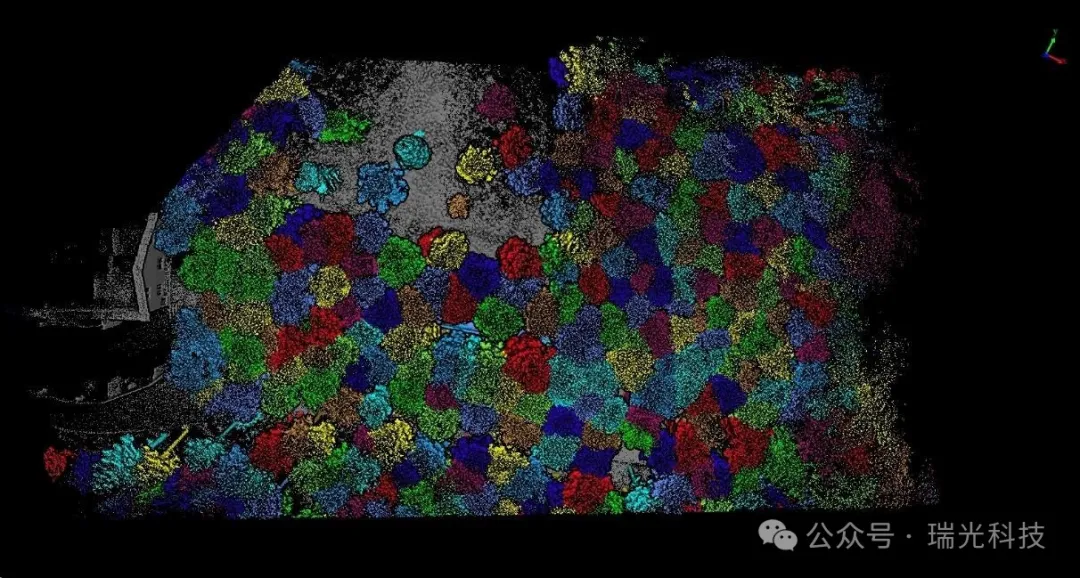
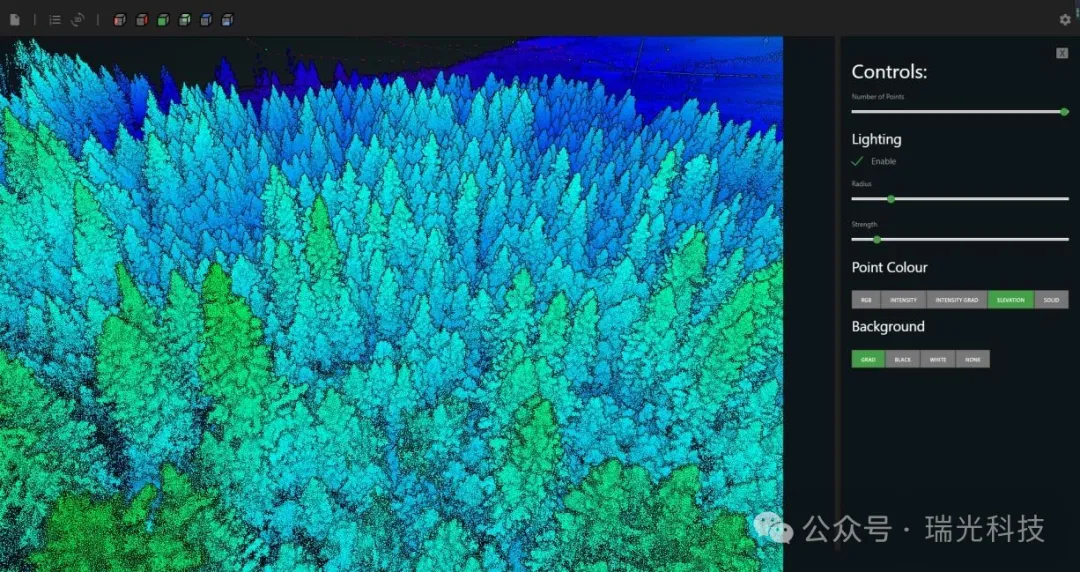
点云成果展示:

总结:
随着三维激光扫描技术的普及与发展,人们已经感受到它与传统测量仪器之间的天差地别。利用三维激光扫描设备获取的点云数据可以实现林地树木的三维结构重建,获得精确的树高、胸径、树冠面积及体积等数据,为林地资源调查等项目提供了宝贵的资料。这种作业方法不仅节约了时间,提高了作业效率,也大大减少了人力、物力的投入。GeoSLAM手持三维激光扫描仪作业方式灵活,单人即可完成扫描作业,能够快速完整地获取林地树木的三维激光扫描数据。
河南瑞光科技有限公司作为DJI大疆创新河南区S级经销商,也是FARO中国经销商。我们将继续保持“诚信、专注、创新、发展”的经营理念和服务宗旨,为您提供品质卓越的航测无人机、三维建模、测绘仪器等综合解决方案,还为您提供追踪式、贴心式的售后服务,力争让民族的测绘事业与世界同步。
📞宋经理:156 3818 8617(微信同号)
📞张经理:138 3710 1961(微信同号)
📞杨经理:151 3612 6390(微信同号)
☎联系电话:0371-67719698
📧邮箱:150313638@qq.com